A Framework for Flexible, Hardware-Accelerated, and
High-Quality Volume Rendering
Abstract
Through the invention of new rendering algorithms and an enormous
development of graphics hardware in the past it is now possible to
perform interactive hardware-accelerated high quality volume
rendering as well as iso-surface reconstruction on low cost
standard PC graphics hardware.
In this paper we introduce a flexible framework that supports the
most common graphics adapters without additional need of setup as
well as several vendor-dependent OpenGL-extensions like pixel-,
texture- and fragment-shader. Additionally the framework
integrates most recent presented rendering techniques which
significantly improve image-quality as well as performance of
standard hardware based volume rendering (and iso-surface
reconstruction) approaches.
Special focus of the presented framework is concentrated on
splitting up the rendering process into several principal subtasks
to provide easy reuse possibilities by only extending the
appropriate modules without need to change the overall rendering
implementation.
The major objective of the prototype is to provide comparison
possibilities for several hardware accelerated volume
visualizations with respect to performance and quality.
Keywords: volume rendering, volume visualization, graphics hardware, isosurface-reconstruction, OpenGL, flexible framework
1 Introduction
For visualization of volumetric data direct volume rendering
[6,7] is an important technique to get
insight into data. The key advantage of direct volume rendering
over surface rendering approaches is the potential to show the
structure of the value distribution throughout the volume. Due to
the fact that each volume sample contribution to the final image
is included, it is a challenge to convey that value distribution
simple and precisely.
Because of an enormous development of low-cost 3D hardware
accelerators in the last few years the features supported by
consumer-oriented graphics boards are also very interesting for
professional graphics developers. Especially NVIDIA's
[15] pixel- and texture shader and ATI's
[13] fragment shader are powerful extensions to standard
2D and 3D texture mapping capabilities. Therefore high-performance
and high-quality volume rendering at very low costs is now
possible. Several approaches of hardware-accelerated direct volume
rendering have been introduced to improve rendering speed and
accuracy of visualization algorithms. Thus it is possible to
provide interactive volume rendering on standard PC
platforms and not only on special-purpose hardware.
In this paper we present an application that includes several
different visualization algorithms for direct volume rendering as
well as direct iso-surface rendering. The major objective of the
prototype is to provide comparison possibilities for several
hardware accelerated volume visualizations with respect to
performance and quality. On startup of the software, the installed
graphics adapter is detected automatically and regarding to the
supported OpenGL-features the user can switch between the
available rendering modes supported by the current graphics
hardware. The full functionality includes pre- and post
classification modes as well as pre-integrated classification
modes (see Section 3.2 and 3.3). All algorithms are implemented
exploiting both 2D or 3D texture mapping as well as optional
diffuse and specular lighting. Additionally we have adopted the
high-quality reconstruction technique based on PC-hardware,
introduced by Hadwiger et al. [4], to
enhance the rendering quality through high-quality filtering.
The major challenge is combining diverse approaches in one simple
understandable framework that supports several graphics adapters
which have to be programmed completely different and still provide
portability for implementation of new algorithms and support of
new hardware-features.
The paper is structured as follows. Section 2 gives a short
overview of work that has been done on volume rendering and
especially on hardware-accelerated methods. Section 3 is then
going to introduce the main topic, namely volume rendering in
hardware (texture based), providing a brief overview of the major
approaches and describing different classification techniques. In
Section 4 we will then discuss the implementation in detail,
starting with the basic structure of our framework, afterwards
describing the differences between ATI and NVIDIA graphics
adapters and the implementation of several volume rendering
techniques as well as iso-surface reconstruction modes. This
section also covers some problems that have to be overcome if
supporting graphics adapters from different vendors. Moreover the
section includes some performance issues and other application
specific problems we encountered during prototype implementation.
Section 5 summarizes what we have presented and additionally some
future work that we are planning at the moment will be briefly
mentioned.
2 Related Work
Usually visualization approaches for scalar volume data can be
classified into indirect volume rendering, such as iso-surface
reconstruction, and direct volume rendering techniques that
immediately display the voxel data.
In contrast to indirect volume rendering, where an intermediate
representation through surface extraction methods (e.g. the
Marching Cube algorithm [8]) is generated and
then displayed, direct volume rendering uses the original data.
The basic idea of using object-aligned slices to substitute
trilinear by bilinear interpolation was introduced by Lacroute and
Levoy [5], the ShearWarp
algorithm.
The texture-based approach presented by Cabral
[2] has been expanded by Westermann and Ertl
[16], who store density values and
corresponding gradients in texture memory and exploit OpenGL
extensions for unshaded volume rendering and shaded iso-surface
rendering. Based on their implementation, Meißner et al.
[10] have extended the method to enable diffuse
illumination for semi-transparent volume rendering but resulting
in a significant loss in rendering performance.
Rezk-Salama et al. [11] presented a technique that
significantly improves both performance and image quality of the
2D-texture based approach. But in contrast to the techniques
presented previously (all based on high-end graphics
workstations), they show how multi-texturing capabilities of
modern consumer PC graphics boards are exploited to enable
interactive volume visualization on low-cost hardware. Furthermore
they introduced methods for using NVidia's register combiner
OpenGL extension for fast shaded isosurfaces, interpolation and
volume shading.
Engel at al. [3] extended the usage of low-cost hardware
and introduced a novel texture-based volume rendering approach
based on pre-integration (presented by Röttger, Kraus and Ertl
in [12]). This method provides high image quality
even for low-resolution volume data and non-linear transfer
functions with high frequencies by exploiting multi-texturing,
dependent textures and pixel-shading operations, available on
current programmable consumer graphics hardware.
3 Hardware-Accelerated Volume Rendering
This section gives a brief overview of general direct volume
rendering, especially the theoretical background. Then we focus on
how to exploit texture mapping hardware for direct volume
rendering purposes and afterwards we discuss the varying
classification methods that we have implemented. Additionally we
briefly mention the hardware-accelerated filtering method, that we
use for quality enhancements.
3.1 Volume Rendering
Algorithms for direct volume rendering differ in the way the
complex problem of image generation is split up into several
subtasks. A common classification scheme differentiates between
image-order and object-order approaches. An example for an
image-order method is ray-casting, in contrast object-order
methods are cell-projection, shear-warp, splatting, or
texture-based algorithms.
In general all methods use an emission-absorption model for the
light transport. The common theme is an (approximate) evaluation
of the volume rendering integral for each pixel, in other words an
integration of attenuated colors (light emission) and extinction
coefficients (light absorption) along each viewing ray. The
viewing ray x(l) is parametrized by the distance l
to the viewpoint. For any point x in space, color is emitted
according to the function c(x) and absorbed according to the
function e(x). Then the volume rendering integral is
|
I= |
�
�
|
D
0
|
c(x(l))exp |
�
�
|
- |
�
�
|
l
0
|
e(x(t))dt |
�
�
|
dl |
| (1) |
where D is the maximum distance, in other words no color is
emitted for l greater than D.
For visualization of a continuous scalar field this integral is
not useful since calculation of emitted colors and absorption
coefficients is not specified. Therefore in direct volume
rendering, the scalar value given at a sample point is mapped to
physical quantities that describe the emission and absorption of
light at that point. This mapping is called
classification (classification will be discussed in
detail in Sections 3.2 and 3.3). This is usually performed by
introducing transfer functions for color emission and opacity
(absorption). For each scalar value s=s(x) the transfer function
maps data values to color C(s) and opacity a(s) values.
Additionally other parameters can influence the color emission or
opacity, e.g., ambient, diffuse and specular lighting conditions
or the gradient of the scalar field (e.g. in
[6]).
Calculating the color contribution of a point in space with
respect to the color value (through transfer function) and all
other parameters is called shading.
Usually an analytical evaluation of the volume integral is not
possible. Therefore a numerical approximation of the integral is
calculated using a Riemann sum for n equal ray segments of length
d=D/n (see Section IV.A in [9]). This technique
results in the common approximation of the volume rendering
integral
|
I � |
n
�
i=0
|
aiCi |
i-1
�
j=0
|
(1-aj) |
| (2) |
which can be adapted for back-to-front compositing resulting in
the following equation
where now aiCi corresponds to c(x(l)) from
the volume rendering integral. The pre-multiplied color aC
is also called associated color [1].
Due to the fact that a discrete approximation of the volume
rendering integral is performed, according to the sampling
theorem, a correct reconstruction is only possible with sampling
rates larger than the Nyquist frequency. Because of the
non-linearity of transfer functions (increases Nyquist frequency
for the sampling), it is not sufficient to sample a volume with
the Nyquist frequency of the scalar field. This undersampling
results in visual artifacts that can only be avoided by very
smooth transfer functions. Section 3.3 gives a brief overview on a
classification method realizing an improved approximation of the
volume rendering.
3.2 Pre- and Post-Classification
As mentioned in the previous section classification has an
important part in direct volume rendering. Thus there are
different techniques to perform the computation of C(s)
and a(s). In fact, volume data is presented by a
3D array of sample points. According to sampling theory, a
continuous signal can be reconstructed from these sampling points
by convolution with an appropriate filter kernel. The order of the
reconstruction and the application of the transfer function
defines the difference between pre- and post-classification, which
leads to remarkable different visual
results.
Pre-classification denotes the application of the transfer
function to the discrete sample points before the data
interpolation step. In other words the color and absorption are
calculated in a pre-processing step for each sampling point and
then used to interpolate C(s) and a(s)
for the computation of the volume rendering
integral.
On the other side post-classification reverses the order of
operations. This type of classification is characterized by the
application of the transfer function after the interpolation of
s(x) from the scalar values of the discrete sampling
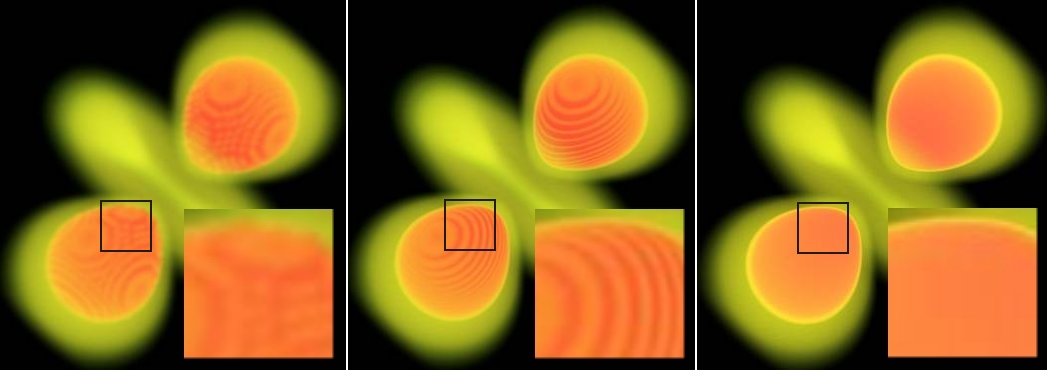
points. The results of both pre- and post-classification can be
compared in Figure 1.
Figure 1: Direct volume rendering without illumination, pre-classified (left), post-classified (middle) and pre-integrated (right)
3.3 Pre-Integrated Classification
As discussed at the end of Section 3.1 to gather better visual
results, the approximation of the volume rendering integral has to
be improved. Röttger et al. [12] presented a
pre-integrated classification method that has been adapted for
hardware accelerated direct volume rendering by Engel et al.
[3]. The main idea of pre-integrated classification is
to split the numerical integration process. Separate integration
of the continuous scalar field and the transfer functions is
performed to cope with the problematic of the Nyquist frequency.
In more detail, for each linear segment one table lookup is
executed, where each segment is defined by the scalar value at the
start of the segment sf, the scalar value at the end of the
segment sb and the length of the segment d. The opacity
ai of the i-th line segment is approximated by
|
|
|
|
1-exp |
�
�
|
- |
�
�
|
(i+1)d
id
|
t(s(x(l)))dl |
�
�
|
|
| |
| |
|
| 1-exp |
�
�
|
- |
�
�
|
1
0
|
t((1-w)sf+w sb)d dw |
�
�
|
. |
| | (4) |
Analogously the associated color (based on
a non-associated color transfer function) is computed
through
|
|
|
|
|
�
�
|
1
0
|
t((1-w)sf+wsb)c((1-w)sf+wsb) |
| | (5) |
| |
|
| ×exp |
�
�
|
- |
�
�
|
w
0
|
t((1-w�)sf+w� sb)d dw� |
�
�
|
d dw. |
| |
Both functions are dependent on sf, sb, and d (only if
lengths of the segments are not equal). Because pre-integrated
classification always computes associated colors,
aiCi in equation (2) has to be substituted by
Ci.
Through this principle the sampling rate does not depend anymore
on the non-linearity of transfer functions, resulting in less
undersampling artifacts. Therefore, pre-integrated classification
has two advantages, first it improves the accuracy of the visual
results, and second fewer samples are required to achieve equal
results regarding to the other presented classification methods.
The major drawback of this approach is that the lookup tables must
be recomputed every time the transfer function changes. Therefore,
the pre-integration step should be very fast. Engel et al.
[3] proposes to assume a constant length of the segments
and the usage of integral functions for t(s) and
t(s)c(s) the evaluation of the integrals in equations (4) and
(5) can be greatly accelerated. Adapting this idea results in the
following approximation of the opacity and the associated
color
|
|
|
|
1-exp |
�
�
|
- |
d
sb-sf
|
(T(sb)-T(sf)) |
�
�
|
|
| |
| |
|
| | (6) |
with the integral functions T(s)=�0st(s)ds and
Kt(s)=�0st(s)c(s)ds. Thus, the numerical
computing for producing the lookup tables can be minimized by only
calculating the integral functions T(s) and Kt(s).
Afterwards computing the colors and opacities according to
equations (6) can be done without any further integration. This
pre-calculation can be done in very short time, so providing
interactivity in transfer-function changes. The quality
enhancement of pre-integrated classification in comparison to pre-
and post-classification can be seen in Figure 1.
3.4 Texture Based Volume Rendering
Basically there are two different approaches how hardware
acceleration can be used to perform volume rendering.
3D texture-mapped volume rendering
If 3D-textures are supported by the hardware (like on the
ATI-Radeon family [13] or the NVIDIA GeForce 3 and 4
[15]) it is possible to download the whole volume
data set as one single three-dimensional texture to hardware.
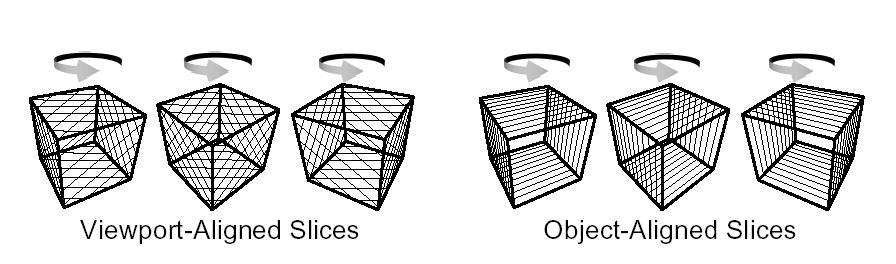
Because hardware is able to perform trilinear interpolation within
the volume, it is possible to render a stack of viewport-aligned
polygon slices orthogonal to the current
viewing direction (see Figure 2, left).
This viewport-aligned slice stack has to be recomputed every time,
the viewing position changes. Finally, in the compositing step,
the textured polygons are blended onto the image-plane in a
back-to-front order. This is done by using the alpha-blending
capability of computer graphics hardware which usually results in
a semitransparent view of the volume. In order to obtain
equivalent representations while changing the number of slices,
opacity values have to be adapted according to the slice distance.
2D texture-mapped volume rendering
If hardware does not support 3D texturing, 2D texture mapping
capabilities can be used for volume rendering. In this case, the
polygon slices are set orthogonal to the principal viewing axes of
the rectilinear data grid. Therefore if the the viewing direction
changes by more than 90 degrees, the orientation of the slice
normal has to be changed. This requires that the volume has to be
represented through three stacks of slices, one for each slicing
direction respectively (see Figure 2, right).
2D texturing hardware does not have the ability to perform
trilinear interpolation (as performed by 3D texturing hardware),
so it is substituted by bilinear interpolation within each slice,
which is supported by hardware. This results in strong visual
artifacts due to the fact of the missing spatial interpolation.
Another major drawback of this approach in contrast to the
previous one is the high memory requirements, because 3 instances
of the volume data set have to be hold in memory. To obtain
equivalent representations, the opacity values have to be adopted
according to the slice distance between adjacent slices in
direction of the viewing ray.
Figure 2: Alignment of texture slices for 3D texturing on the left,
and 2D texturing on the right (image from Rezk-Salama et al. [11])
3.5 High-Quality Filtering
Commodity graphics hardware can also be exploited to achieve
hardware-accelerated high-quality filtering with arbitrary filter
kernels, as introduced by Hadwiger et al. [4]. In
this approach filtering of input data is done by convolving it
with an arbitrary filter kernel stored in multiple texture maps.
As usual, the base is the evaluation of the well-known filter
convolution sum
|
g(x)=(f*h)(x)= |
�x�+m
�
i=�x�-m+1
|
f[i]h(x-i) |
| (7) |
this equation describes a convolution of the discrete input
samples f[i] with a reconstruction filer h(x) of (finite)
half-width m.
To be able to exploit standard graphics hardware to perform this
computation, the standard evaluation order (as used in
software-based filtering) has to be reordered. Instead of
gathering all input sample contributions within the kernel width
neighborhood of a single input sample, this method distributes all
single input sample contributions to all relevant output samples.
The input sample function is stored in a single texture and the
filter kernel in multiple textures. Kernel textures are scaled to
cover exactly the contributing samples. The number of contributing
samples is equal to the kernel width. To be able to perform the
same operation for all samples at one time, the kernel has to be
divided into several parts, to cover always only one input sample
width. Such parts are called filter tiles.
Instead of imagining the filter kernel being centered at the
"current" output sample location, an identical mapping of input
samples to filter values can be achieved by replicating a single
filter tile mirrored in all dimensions repeatedly over the output
sample grid. The scale of this mapping is chosen, so that the size
of a single tile corresponds to the width from one input sample to
the next.
The calculation of the contribution of a single specific filter
tile to all output samples is done in a single rendering pass. So
the number of passes necessary is equal to the number of filter
tiles the filter kernel used consists of. Due to the fact that
only a single filter tile is needed during a single rendering
pass, all tiles are stored and downloaded to the graphics hardware
as separate textures. If a given hardware architecture is able to
support 2n textures at the same time, the number of passes can
be reduced by n.
This method can be applied for volume rendering purposes by
switching between two rendering contexts. One for the filtering
and one for the rendering algorithm, whereas first a textured
slice is filtered according to the just described method, and
afterwards the filtered output is then used in the standard volume
rendering pipeline. This is not as easy as it sounds, thus
implementation difficulties are described in more detail in
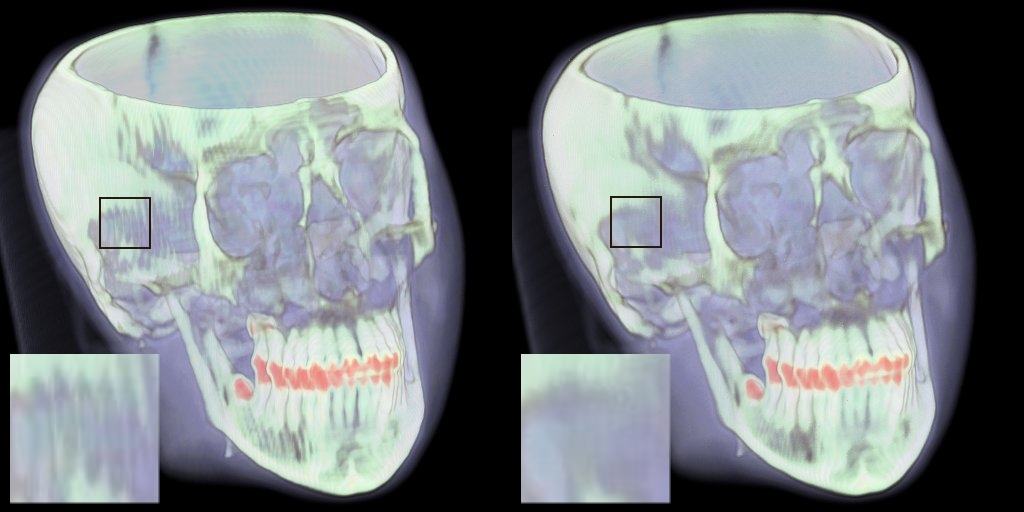
section 4.1. For results see Figure 3.
Figure 3: Pre-integrated classification without pre-filtered slices (left) and applying hardware-accelerated filtering (right).
4 Implementation
Our current implementation is based on a graphical user interface
programmed in java, and a rendering library written in c++. For
proper usage of the c++ library in java, e.g. for parameter
passing, we exploit the functionality of the java native
interface, which describes how to integrate native code within
programs written in java. Due to the fact that our implementation
is based on the OpenGL API, we need a library that maps the whole
functionality of the native OpenGL library of the underlying
operating system to java. Therefore we use the GL4Java library
[14]. The following detailed implementation
description will only cover the structure of the c++ rendering
library, because all rendering
functionality is encapsulated there.
On startup of the framework, the graphics adapter currently
installed in the system is detected automatically. Regarding to
the OpenGL extensions that are supported by the actual hardware
the rendering modes that are not possible are disabled. Through
this procedure, the framework is able to support a lot of
different types of graphics adapters without changing the implementation.
Anyway the framework is primarily based on graphics chips from
NVidia and from ATI, because the OpenGL-extensions provided by
these two vendors are very powerful features, which can be
exploited very well for diverse direct volume rendering
techniques. Minimum requirements for our application are
multi-texturing capabilities. Full functionality includes the
exploitation of the so called texture shader OpenGL
extension and the register combiners provided by NVidia
as well as the fragment shader extension, provided
by ATI.
Basically the texture based volume rendering process can be split
up into several principal subtasks. Each of these tasks is
realized in one or more modules, to provide easy reuse
possibilities. Therefore the implementation of new algorithms and
the support of new hardware-features (OpenGL-extensions) is very
simple by only extending these modules with additional
functionality. The overall rendering implementation need not to be
changed to achieve support of new techniques or new graphics
chips.
Texture definition
As described in section 3.4, in the beginning of the rendering
process the scalar volume data must be downloaded to the hardware.
According to the selected rendering mode, this is either be done
as one single three-dimensional texture or as three stacks of
two-dimensional
textures.
The selected rendering mode additionally specifies the texture
format. In our context texture format means, what values are
presented in a texture. Normally, RGBA (Red, green, blue and alpha
component) color values are stored in a texture, but in volume
rendering, other information as the volume gradient or the density
value have to be accessed during the rasterization stage. For
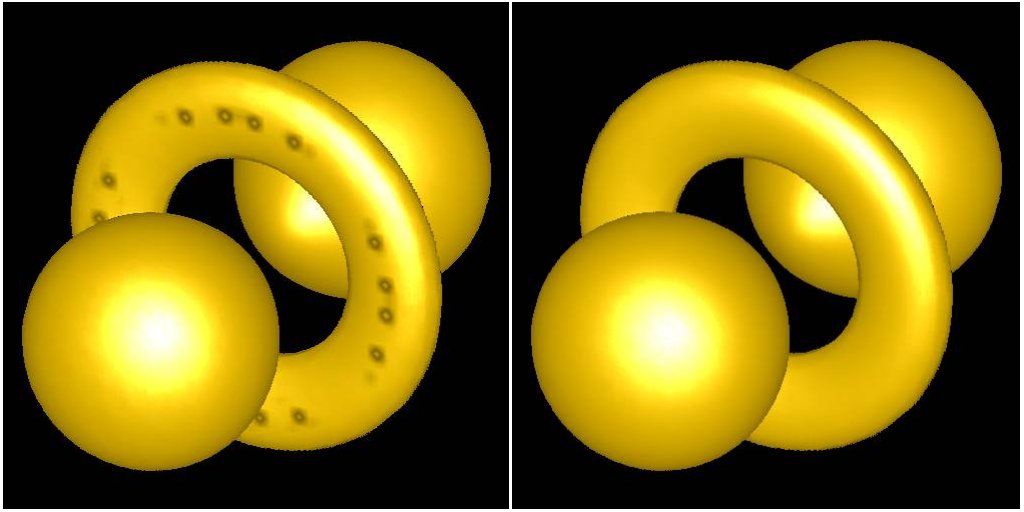
gradient vector reconstruction, we have implemented a
central-difference filter and additionally a sobel-operator, which
results in a great quality enhancement in contrast to the
central-difference method, avoiding severe shading artifacts (see
Figure 4).
Figure 4: Gradient reconstruction using a central-difference filter (left) and avoiding the shading artifacts (black holes) by using a sobel-operator (right)
When performing shading calculations, RGBA textures are usually
employed, that contain the volume gradient in the RGB components
and the volume scalar in the ALPHA component. As in pre-integrated
rendering modes the scalar data has to be available in the first
three components of the color vector, it is stored in the RED
component. The first gradient component is stored in the ALPHA
component in return. Another exception occurs for rendering modes,
which are based on gradient-weighted opacity scaling, where the
gradient magnitude is stored in the ALPHA component. Through the
limitation of only four available color components, it is trivial
that for the combination of some rendering modes it is not
possible to store all the required values for a single slice in
only one texture.
Projection
The geometry used for direct volume rendering, in contrast to
other methods, e.g. iso-surface extraction, is usually very
simple. Due to the fact that texture-based volume rendering
algorithms usually perform slicing through a volume, the geometry
only consists of one quadrilateral polygon for each slice. To
obtain correct volume information for each slice, each polygon has
to be bound to the corresponding textures that are required for
the actual rendering mode. In addition, the texture coordinates
have to be calculated accordingly. Usually this is a very simple task.
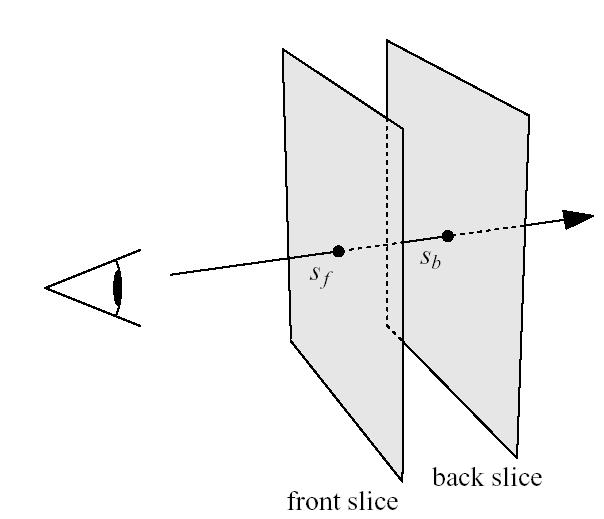
Just for 2D-texture based pre-integrated classification modes, it
is a little bit more complex. Instead of the general
slice-by-slice approach, this algorithm renders slab-by-slab (see
Figure 5) from back to front into the frame buffer. A single
polygon is rendered for each slab with the front and the back
texture as texture maps. To have texels along all viewing rays
projected upon each other for the texel fetch operation, the back
slice must be projected onto the front slice. This projection is
performed by adapting texture coordinates for the projected
texture slice, which always depends on the actual viewing
position.
Figure 5: A slab of the volume between two slices. The scalar values on the front and on the back slice for a particular viewing ray are called sf and sb (image from Engel et al. [3])
Compositing
Usually in hardware accelerated direct volume rendering
approaches, the approximation of the volume rendering integral is
done by back-to-front compositing of the rendered quadriliteral
polygon slices. This should be performed according to equation
(3). In general this is achieved by blending the slices into the
frame buffer with the OpenGL blending function
glBlendFunc(GL_ONE,GL_ONE_MINUS_SRC_ALPHA).
This is a correct evaluation only, if the color-values computed by
the rasterization stage are associated colors. If they are not
pre-multiplied (e.g. gradient-weighted opacity modes produce
non-associated colors), then the blending function must be
glBlendFunc(GL_SRC_ALPHA,GL_ONE_MINUS_SRC_ALPHA).
Iso-surface reconstruction in hardware is in general accomplished
by cleverly exploiting the OpenGL alpha-test (e.g.
glAlphaFunc(GL_GREATER, 0.4)) to display the
specified isovalues only.
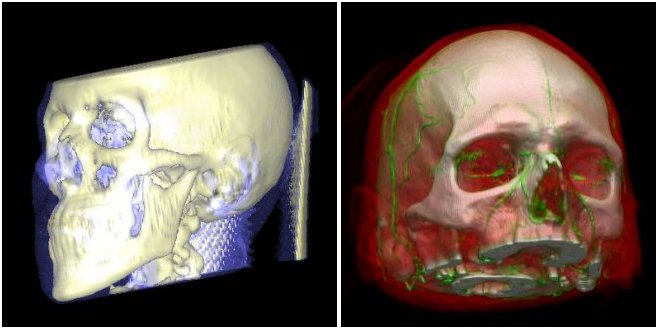
These two techniques can be combined for rendering
semi-transparent iso-surfaces (see Figure 6, left), where the
alpha-test is used for rejecting all fragments not belonging to an
iso-surface, and afterwards the slices are blended into the frame
buffer, as described above. A detailed description of iso-surface
reconstruction follows in Section 4.1.
Register settings
Depending on the selected rendering mode, during the rasterization
process, the actual performed rendering technique often needs more
input data than available through the slice textures (in general
hold gradient and/or density information). For shading
calculations the direction of the light source must be known. When
modelling specular reflection the rasterization stage requires not
only the light direction, but also the direction to the viewer's
eye, because a halfway vector is used to approximate the intensity
of specular reflection. Additionally some rendering modes need to
access specific constant vectors, to perform dot-products for
gradient reconstruction for example. This information has to be
stored at a proper place. Therefore NVidia and ATI provide some
special registers which can be accessed during rasterization
process when using the register combiners
extension or the fragment shader extension.
The register combiners extension, as described in
[11], is able to access two constant color registers
(in addition to the primary and secondary color), which is not
sufficient for complex rendering algorithms. In the GeForce3
graphics chip, NVidia has extended the register handling by
introducing the register combiners2 extension, providing
per-combiner constant color registers. This means that each
combiner-stage has access to its own two constant registers, so
the maximum number of additional information, provided by RGBA
vectors, is the number of combiner stages multiplied by two,
respectively sixteen on GeForce3. In contrast all ATI graphics
chips (e.g. Radeon 8500, ...), that support the OpenGL
fragment shader extension provide access to an equal
number of constant registers, namely eight.
Due to the fact that miscellaneous rendering modes need different
information contained in the constant registers, the process of
packing the required data into the correct registers is more
complex than it sounds. In addition these constant settings
intensely influence the programming of the rasterization stage,
where each different register setting requires a new
implementation of the rasterization process.
Figure 6: Semi-transparent iso-surface rendering (left) and pre-integrated volume rendering (right) of different human head data sets.
4.1 NVIDIA vs. ATI
As mentioned above our current implementation supports several
graphics chips from NVidia as well as several graphics chips from
ATI. In this section we discuss the differences between
realizations of several rendering algorithms according to the
hardware-features supported by NVidia and ATI. The main focus is
set on the programming of the flexible rasterization hardware,
enabling advanced rendering techniques like per pixel-lighting or
advanced texture-fetch methods. The differences will be discussed
in detail by showing some implementation details for some concrete
rendering modes after giving an short overview of rasterization
hardware differences in OpenGL.
In general the flexible rasterization hardware consists of
multi-texturing capabilities (allowing one polygon to be textured
with image information obtained from multiple textures),
multi-stage rasterization (allowing to explicitly control how
color-, opacity- and texture-components are combined to form the
resulting fragment, per-pixel shading) and dependent
texture address modification (allowing to perform diverse
mathematical operations on texture coordinates and to use these
results for another texture lookup).
NVidia
On graphics hardware with an NVidia chip, this flexibility is
provided through several OpenGL extensions, mainly
GL_REGISTER_COMBINERS_NV and GL_TEXTURE_SHADER_NV.
When the register combiners extension is enabled, the
standard OpenGL texturing units are completely bypassed and
substituted by a register-based rasterization unit. This unit
consists of two (eight on GeForce3,4) general combiner stages and
one final
combiner stage.
Per-fragment information is stored in a set of input registers,
and these can be combined, i.e. by dot product or component-wise
weighted sum, the results are scaled and biased and finally
written to arbitrary output registers. The output registers of the
first combiner stage are then input registers for the next stage,
and so on.
When the per-stage-constants extension is enabled
(GL_PER_STAGE_CONSTANTS_NV), for each combiner stage
two additional registers are available, that can hold arbitrary
data, otherwise two additional registers are available too, but
with equal contents for every stage.
The texture shader extension provides a superset of
conventional OpenGL texture addressing. It provides a number of
operations that can be used to compute texture coordinates
per-fragment rather than using simple interpolated per-vertex
coordinates. The shader operations include for example standard
texture access modes, dependent texture lookup (using the result
from a previous texture stage to affect the lookup of the current
stages), dot product texture access (performing dot products from
texture coordinates and a vector derived from a previous stage)
and several special modes.
The implementation of these extensions results in a lot of code,
because the stages have to be configured properly, and an
assembler like programming is not provided.
ATI
On graphics hardware with an ATI Radeon chip, this flexibility is
provided through one OpenGL extension,
GL_FRAGMENT_SHADER_ATI. Generally this extension is very
similar to the the extensions described before, but encapsulates
the whole functionality in a single extension. The
fragment shader extension inserts a flexible per-pixel
programming model into the graphics pipeline in place of the
traditional multi-texture pipeline. It provides a very general
means of expressing fragment color blending and dependent texture
address modification.
The programming model is a register-based model and the number of
instructions, texture lookups, read/write registers and constants
is queryable. E.g. on the ATI Radeon 8500 there are six texture
fetch operations and eight instructions possible, both two times
during one rendering pass, yielding maximum of sixteen
instructions in total.
One advantageous property of the model is a unified instruction
set used throughout the shader. That is, the same instructions are
provided when operating on address or color data. Additionally,
this unified approach simplifies programming (in contrast to the
above presented NVidia extensions), because only a single
instruction set has to be used and the fragment shader
can be programmed comparable to an assembler language.
This tremendously reduces the amount of produced code and
therefore accelerates and simplifies debugging. For these reasons
and because up to six textures are supported by the
multi-texturing environment, ATI graphics chips provide
powerful hardware features to perform hardware-accelerated high-quality volume rendering.
Pre- and Post-classification
As described in detail in Section 3.2, pre- and
post-classification differ in the order of the reconstruction step
and the application of the transfer function.
Since most NVidia graphics chips support paletted
textures (OpenGL extension
GL_SHARED_TEXTURE_PALETTE_EXT), pre-classified volume
rendering is easy to implement. Paletted textures means
that instead of RGBA or luminance, the internal format of a
texture is an index to a color-palette, representing the mapping
of a scalar value to a color (defined by transfer-function). This
lookup is performed before the texture fetch operation (before the
interpolation), thus pre-classified volume rendering is performed.
Since there is no similar OpenGL-extension supported by ATI
graphics chips, rendering modes, based on pre-classification are
not available on ATI hardware.
Post-classification is available on graphics-chips from both
vendors, in case that advanced texture-fetch possibilities are
available. As described in the beginning of this section when
using the texture- and fragment-shader,
dependent texture lookups can be performed. This feature is
exploited for post-classification purposes. The transfer function
is downloaded as a one-dimensional texture and for each texel,
fetched by the given per-fragment texture coordinates, the scalar
value is used as a lookup coordinate into the dependent 1D
transfer-function texture. Thus post-classification is available,
because the scalar value obtained from the first texture fetch has
been bi- or trilinearly filtered, dependent on whether 2D or 3D
volume-data textures are employed, and the transfer-function is
applied afterwards.
Pre-integration
As post-classification, pre-integrated classification can also be
performed on graphics-chips from both vendors if texture
shading is available. The pre-integrated transfer-function, since
dependent on two scalar values (sf from the front and sb
from the back slice, see Figure 5 and Section 3.3 for details) is
downloaded as a two-dimensional texture, containing pre-integrated
color and opacity values for each of the possible combinations of
front and back scalar values.
For each fragment, texels of two adjacent slices along each ray
through the volume are projected onto each other. Then the two
fetched texels are used as texture coordinates for a dependent
texture lookup into the 2D pre-integration texture. To extract the
scalar values, usually stored in the red component of the texture,
the dot product with a constant vector v=(1,0,0)T is applied.
These values are then used for the lookup and the resulting
fetched texel is then used for lighting calculations. An example
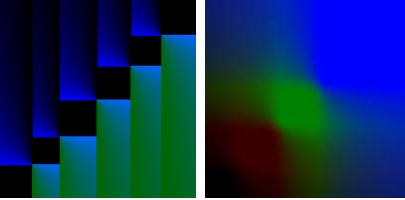
of a pre-integration dependent texture is shown in Figure 7.
Figure 7: Dependent textures for multiple iso-surfacing (left) and pre-integrated classification (right)
Iso-surface reconstruction
The standard approach to render single iso-surfaces (as proposed
by Westermann and Ertl [16]) without
extracting any polygonal representation cleverly exploits the
OpenGL alpha test. If the texture describing the volume contains
the volume density in its alpha component, the volume is then
rendered into the frame buffer using the alpha-test to compare the
data value with a specified iso-value. Through this procedure a
voxel is only rendered if its density value is, e.g., larger or
equal to the iso-value, limiting the number of possible
iso-surfaces to only one non-transparent.
Multi-stage rasterization is then exploited to perform shading
with multiple light-sources as well as the addition of ambient
lighting. The voxel gradient is stored in the RGB components of
the texture and the available dot product is used to calculate the
light intensity. The possibility of using colored light sources is
also provided. If only 2D textures are available the approach of
Rezk-Salama et al. [11] to produce intermediate
slices on the fly can be combined with iso-surface reconstruction,
resulting in better image quality. Figure 8 shows a sample
register combiner setup.
Figure 8: Register combiner setup for shaded isosurfaces (image from Rezk-Salama et al. [11])
The presented usage of dependent texture lookups can also be
employed to render multiple isosurfaces. The basic idea is to
color each ray segment according to the first isosurface
intersected by the ray segment. So the dependent texture contains
color, transparency, and interpolation values
(IP=(siso-sf)/(sb-sf)) for each combination of back
and front scalar. To differ between ray segments that do or do not
intersect an isosurface an interpolation value of 0 is stored for
ray segments not intersecting an isosurface. The interpolation
values are then stored in the alpha channel in the range 128 to
255 and the alpha-test is used again to discard voxels not
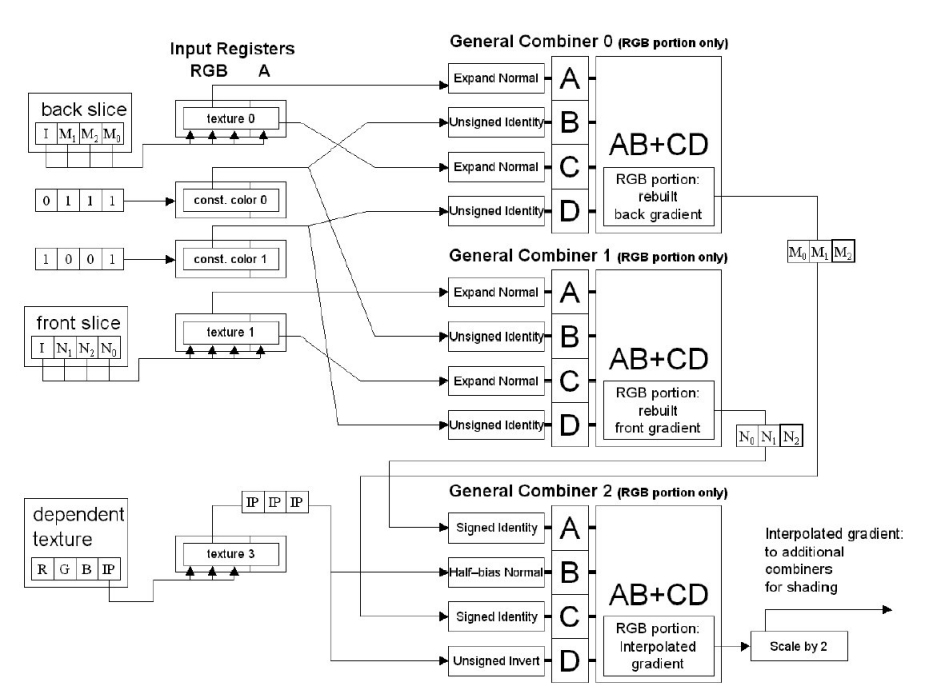
belonging to an isosurface. For lighting purposes the gradient of
the front and back slice has to be rebuilt in the RGB components
and the two gradients have to be interpolated depending on the
given isovalue. The implementation of this reconstruction using
register combiners is shown in Figure 9.
The main disadvantage of this method is that the transparency,
which is usually freely definable for each isosurface's back and
front face, is now constant for all isosurfaces' faces. This
problem can be overcome by storing the interpolation values in the
blue component of the dependent texture. Now the transparency for
each isosurface can be freely defined but the blue color channel
has to be filled with a constant value that is equal for all
isosurfaces' back and front faces. The alpha test is exploited by
assigning 0.0 to the alpha channel of each texel not belonging to
an isosurface. Figure 7 shows a dependent texture for multiple
isosurfaces.
Figure 9: Register combiner setup for gradient reconstruction and interpolation with interpolation values stored in alpha (image from Engel et al. [3])
4.2 Problems
When applying the hardware accelerated high quality filtering
method (see Section 3.5) in combination with an arbitrary
rendering mode, we have to cope with different rendering contexts.
One context for the rendering algorithm and one for the high
quality filtering. A single slice is rendered into a buffer, this
result is then used in the filtering context to apply the
specified filtering method (e.g. bi-cubic), and this result is
then moved back into the rendering context, to perform the
compositing step. More difficult is the case of combining the
filtering with preintegration, where two slices have to be
switched between the rendering contexts. Through different
contexts the geometry and the OpenGL state handling is varying
depending on whether filtering is applied or not. It is a
challenge to define and provide the correct data in the right
context and not mixing up the complex state handling. Although the
performance is not so high, the resulting visualizations are very
convincing (see Figure 3).
Another problem that occurs when realizing such a large framework
is that the performance that usually is achieved by the varying
algorithms can not be guaranteed. We tested our framework on a
NVIDIA Geforce3 graphics board. For direct volume rendering (all
possible features enabled) of a volume with a resolution of
1283 we achieved ca 12 fps for pre-, 10 fps for post- and 6
fps for pre-integrated classification. For a volume with a
resolution of 2563 we achieved ca 5 fps for pre-, 4.5 fps for
post- and 4 fps for pre-integrated classification. For isosurface
rendering of a volume with a resolution of 1283 we achieved
ca 12 fps for the standard and 6 fps for the dependent texture
approach. For a volume with a resolution of 2563 ca 4 fps for
the standard and 1 fps for the dependent texture
approach.
Furthermore when performing shading, rendering datasets with
dimensions over 2563 results in a heavy performance loss,
caused by the memory bottle neck. Which means that not the whole
data set can be downloaded to the graphics adapter memory, instead
of, the textures are transferred between the main and the graphics
memory.
5 Conclusions and Future Work
On the basis of standard 2D- and 3D-texture based volume rendering
and several high quality rendering techniques, we have presented a
flexible framework, which integrates several different direct
volume rendering and iso-surface reconstruction techniques that
exploit rasterization hardware of PC graphics boards in order to
significantly improve both performance and image quality.
Additionally the framework can easily be extended with respect to
support of new OpenGL extensions and implementation of new
rendering algorithms, by only expanding the proper modules. The
framework supports most current low-cost graphics hardware and
provides comparison possibilities for several hardware-accelerated
volume visualizations with regard to performance and quality.
In the future we plan the integration of non-photorealistic
rendering techniques to enhance volume visualizations. To overcome
the problem that different graphics chips require different
implementations, we will try the usage of a high-level shading
language.
6 Acknowledgements
This work was carried out as part of the basic research on
visualization (http://www.VRVis.at/vis/) at the VRVis Research
Center Vienna, Austria (http://www.VRVis.at/), which is funded by
an Austrian governmental research project called Kplus.
Special thanks to Markus Hadwiger and Helwig Hauser for patient
supervision.
References
- [1]
-
James F. Blinn.
Jim Blinn's corner: Compositing. 1. Theory.
IEEE Computer Graphics and Applications, 14(5):83-87,
September 1994.
- [2]
-
Brian Cabral, Nancy Cam, and Jim Foran.
Accelerated volume rendering and tomographic reconstruction using
texture mapping hardware.
In 1994 Symposium on Volume Visualization, pages 91-98. ACM
SIGGRAPH, October 1994.
- [3]
-
Klaus Engel, Martin Kraus, and Thomas Ertl.
High-quality pre-integrated volume rendering using
hardware-accelerated pixel shading.
In Proceedings of the ACM SIGGRAPH/EUROGRAPHICS workshop on on
Graphics hardware, pages 9-16. ACM Press, 2001.
- [4]
-
Markus Hadwiger, Thomas Theußl, Helwig Hauser, and Eduard Gröller.
Hardware-accelerated high-quality reconstruction on PC hardware.
In Proceedings of the Vision Modeling and Visualization
Conference 2001 (VMV-01), pages 105-112, Berlin, November 21-23 2001.
Aka GmbH.
- [5]
-
Philippe Lacroute and Marc Levoy.
Fast volume rendering using a shear-warp factorization of the viewing
transformation.
Computer Graphics, 28(Annual Conference Series):451-458,
July 1994.
- [6]
-
Marc Levoy.
Display of surfaces from volume data.
IEEE Computer Graphics and Applications, 8(3):29-37, May 1988.
- [7]
-
Marc Levoy.
Efficient ray tracing of volume data.
ACM Transactions on Graphics, 9(3):245-261, July 1990.
- [8]
-
William E. Lorensen and Harvey E. Cline.
Marching cubes: A high resolution 3D surface construction
algorithm.
Computer Graphics, 21(4):163-169, July 1987.
- [9]
-
Nelson Max.
Optical models for direct volume rendering.
IEEE Transactions on Visualization and Computer Graphics,
1(2):99-108, June 1995.
ISSN 1077-2626.
- [10]
-
Michael Meißner, Ulrich Hoffmann, and Wolfgang Straßer.
Enabling classification and shading for 3D texture mapping based
volume rendering using openGL and extensions.
In IEEE Visualization '99, pages 207-214, San Francisco, 1999.
IEEE.
- [11]
-
C. Rezk-Salama, K. Engel, M. Bauer, G. Greiner, and T. Ertl.
Interactive volume rendering on standard PC graphics hardware using
multi-textures and multi-stage rasterization.
pages 109-118.
- [12]
-
Stefan Röttger, Martin Kraus, and Thomas Ertl.
Hardware-accelerated volume and isosurface rendering based on
cell-projection.
pages 109-116. IEEE Computer Society Technical Committee on Computer
Graphics, 2000.
- [13]
-
ATI web page.
http://www.ati.com/.
- [14]
-
Jausoft GL4JAVA web page.
http://www.jausoft.com/gl4java.html/.
- [15]
-
NVIDIA web page.
http://www.nvidia.com/.
- [16]
-
Rüdiger Westermann and Thomas Ertl.
Efficiently using graphics hardware in volume rendering applications.
In SIGGRAPH 98 Conference Proceedings, Annual Conference
Series, pages 169-178. ACM SIGGRAPH, Addison Wesley, July 1998.