|
Boris Burger, Ondrej Paulovic, Milos Hasan
burger@nextra.sk, twinsen@mayhem.sk, milos.hasan@inmail.sk
Department of Computer Graphics and Image Processing
Faculty of Mathematics, Physics and Informatics
Comenius University
Bratislava / Slovakia
The demoscene is a society of computer enthusiasts, arising since the mid eighties consisting mostly of university and high school students sharing active and usually productive interest in computer graphics, music and related multimedia.
The concept of realtime visualization [1] has been fundamental to the demoscene since its very beginning. It started with short one-man machine code programmed graphic effects on 8-bit computers pushing the hardware to the limit, to today's demos consisting of work by several people. The people involved in making a demo are graphic artists, together with musicians giving the demo it's own feeling and finally programmers utilizing plethora of visually attractive realtime techniques and algorithms to create various effects, putting the pieces of a demo together to create the work of art.
The sceners, which is a term the members of demoscene use to designate themselves, form into demogroups. As insinuated, demogroups consist of one or more coders, graphic artists and musicians, typically from the same or close geographical location. With today's rise of Internet, which itself acts a significant role in the history and evolution of the scene, more and more often it happens that international groups with members from Finland, Poland, Norway or even Japan are formed. The other benefit of Internet lies in a fast and simple access to the demoscene production through archives maintained around the world [2].
For the sake of meeting and competition with other sceners in a friendly atmosphere there are so-called demoparties organized during the year in different parts of the world, mainly Europe. A demoparty is an annual event, being a gathering of people interested in the demoscene combined with competing in categories such as demos and intros - which are in fact demos with a size limit typically set to 64KB, 4KB or 256 bytes [3]. There are categories suited for musicians and graphicians to compete in music, pixel graphics (hand-drawn pixel by pixel), raytraced graphics and many other, depending on the respective party. The greatest demoparties held are Assembly [4] in Finland and The Party [5] in Denmark organized annually for already a decade. Another well-known party is Mekka-Symposium [6] that takes place in Germany. The number of visitors ranges from hundreds coming to smaller ''local'' parties to two or three thousands visiting international events like the ones mentioned previously.
The structure of our paper is as follows: sections 2 and 3 cover the history and present of the demoscene from a computer graphics and programming point of view. The rest of the article, presents three of the demoscene contributions authors of this article participated on, discussing three selected techniques utilized in their creation: a method for parametric representation of a rollercoaster track, creation of light effects using center projection of an object texture onto an environment and painting textures using implicit functions.
The roots of the demoscene date back to the era of 8-bit computers. Groups of crackers focusing on a removal of copy-protections from computer games used to attach a so-called cracktro in front of a game they cracked. It was a small realtime generated visual presentation of their group. The speed of 8-bit computers was very limited then, so these cracktros consisted often only of a scrolling text, some really simple bitmap effects or sometimes a picture in the background.
As the time went on, standalone demos started to appear - with their content resembling cracktros, but they were not bound to a game and were already completely departed from crackers' activities. In those demos authors were trying to push the limits of the current hardware creating new, original, and visually attractive effects. Speed was the reason why all demos were programmed using machine code back then. Effects were mostly 2D those days - scrollers, various bitmap distortions, plasmas and other. The most used computer among sceners was Commodore 64 [7], addressed to be the platform where the whole phenomenon began.
|
Sometime around the year 1986 a new groundbreaking platform for demosceners appeared - Commodore Amiga [8]. Amiga offered hardware for realizing far more complicated algorithms than before. Notably, the artistic design became a strong element characteristic for this period.
Some time later during the era of Amiga, a new Intel 80x86-based PC [9] accompanied with Microsoft's operating system MS-DOS started to establish its position as a computer suitable for home computing. Finally it became the most common platform among demosceners despite a great problem it possessed - most graphic and sound hardware was not compatible with each other. Rather limited amount of memory restricted the demo's execution to a specific computer configuration at times and that didn't help to spread the demos and intros widely across the scene borders.
To be able to fit into tight limitations of that day's computer, demo programmers invented a noteworthy class of effects. These were realized by direct manipulation of graphics hardware, circumventing the operating system such as certain sorts of scrolling text and the so-called copper or multicolor effects. Very popular among the newly introduced techniques was rotozoomer where the computer screen was covered by a rotating and zooming bitmap, which was a starting point for polygon texturing routines utilized in 3D renderers later.
|
The rapid evolvement of the PC platform naturally influenced the character of demos and intros produced. Simple 3D effects appeared, displaying mostly just a single rotating object. Depending on the hardware's speed only the vertices used to be rendered at first, followed by edges, and only later filled polygon surfaces. An interesting class of 3D effects originated in rendering of landscapes, where the landscape's surface was typically visualized using column voxels. This is done by casting a ray for each column of the pixel buffer. It was a simple ancestor of realtime raytracing.
The increasing power of CPUs allowed for faster rendering of textured polygons which opened a whole new scale of possibilities on the field of realtime rendering. A variety of shading models used to be commonly implemented then: constant flat shading, gouraud shading and fake phong shading. The fake phong shading effect was achieved by taking advantage of a special texture combined with computing the texture coordinates from orientation of the normal vectors at the mesh's vertices.
With the end of 90's approaching more complex algorithms saw the light of realtime implementation in demos such as marching cubes, bump-mapping or dynamic shadows. In this period the low-level machine code used to be employed mainly for the most critical parts of a program in the first place. The rest was then programmed using a higher level language like C or rarely Pascal.
|
Even though the phong shaded, environment or bump mapped single object scenes were very nice for the moment, they became boring later on. Thanks to the rapid growth in processing power of CPUs, visualization of more complex 3D scenes was able to emerge. This is how the era of demos based on scene graph renderers started to rise.
|
For some time at the beginning of this new evolutionary step of demoscene, the center of all interest when creating a demo moved to write a fast, convincing and stable realtime polygon rasterizer for use within a scene graph renderer. With the low-end computer processors being still not that fast to make this trivial, programmers had to spend most of their time writing optimized shading, texturing, alpha-blending and other rasterization details in machine code to be able to render convincing 3D scenes at interactive framerates. That is the reason why programmers scarcely had the time to do something else to help making a good demo. Thus the demos produced at the beginning of this era were - though complex at inside - mostly boring fly-bys.
At first, the vast majority of sceners ignored the appearance of Microsoft's new generation of Windows operating systems and continued writing demos and intros using the older DOS platform. Only later on, in part due to the introduction of low-end graphics adapters with the ability of 3D acceleration the scene started to develop demos for this operating system. Unfortunately, the quality did not improve at once and most demos were still only simple 3D scene viewers.
Demoscene is a subject to evolution since its early days. Even though the productive sceners still casually use assembler for its advantages, compose music in trackers, and draw graphics pixel by pixel, the mainstream is elsewhere.
The effects presented in demos are far more complex now. From simple texturing tricks and rendering single object scenes we have come to implicit surface polygonization [10], scene graph rendering, realtime raytracing [11] and radiosity, non-photorealistic rendering [12] and a plenty of other advanced techniques, like procedural generation of textures and geometry.
From a programmer's perspective, the code written is no longer so low-level than before. Concerning rendering and general visualization, the vast majority of production does not utilize any processor specific features and is typically written in a high level and portable language like C++ [13].
With the introduction of sophisticated and fast graphics hardware - lately accessible to home computing - started the diversion from ''classic'' pure software rasterization methods to rendering assisted by hardware acceleration. Hence the demos of today do not depend so much on the underlying processor architecture, they rely on the graphics APIs (Application Programming Interface). There are two APIs widely accepted and used today: OpenGL [14] originated by SGI and Microsoft's DirectX [15], the former being favorable for its elegance, overall design and platform, or to a certain extent, programming language indepedence. On the other hand, DirectX gained many positive improvements lately and possesses a rich set of features, in part due to it's tight binding to the Microsoft's platform.
|
While the Microsoft's DOS was the operating system of demoscene's choice for a long time period mainly due to its wide availability on low-end home computers, this is no longer true. The programmer's nightmare - either graphics or sound hardware incompatibility, was largely cured by the introduction of new generation operating systems suitable for home use. Though demoscene's mainstream uses Microsoft's Win32 platform, it is not uncommon to encounter demos bundled with binaries for multiple platforms including Linux or other Unix flavors. There is also an increasing number of demos produced for hardware architectures like PowerPC, Alpha and video game consoles.
Put together, the need for low-level programming fading away allowed the programmers to concentrate on the more challenging techniques and algorithms. Graphic artists and musicians take advantage of the new sophisticated software and so they are able to create more professional pictures, textures, and music score. At last, the design definitely finds its place in the PC demos and intros of today, being a very strong element.
This demo featured several 2D effects and a scene graph renderer built on a top of a pure software rasterizer. The rasterizer employed texturing combined with gouraud shading using 8 bits of precision for each of the three color channels, supported by a z-buffer with 32 bits of precision. For the sake of fast rasterization we have utilized the MMX instruction set, which proved to be very useful when combining the texture, shading and transparency.
Most of this demo was programmed using C++ except for the rasterization core coded in assembler.
|
In the following sections we will present the behinds of two interesting parts of our demo: train track and bouncing light sphere.
Train track
At this point we will cover the method for creation of
train track models that we've utilized for building up the
rollercoaster part of Expiration.
The primary goal we set up was to design a method that would allow us to create and manipulate the track shape with ease and at the same time provide simple ways of placing vehicles - in our case a locomotive followed by the train's waggons - onto the track.
|
Two basic ways suggesting themselves were to let the work be done by a human 3D artist in a modelling tool or to take a more challenging approach of describing the track's shape in a mathematical way, possibly as a parametric spline and building the track's 3D mesh along the spline.
Although the former alternative of leaving the work up to an artist has the advantage of better control over the appearance of the track's mesh and the possibility of giving the model a kind of an artistic touch; it suffers from two rather unsatisfying properties. Modifications to the track's shape require the artist to make changes to the work already done, which may take time and a considerable effort with the number of modifications increasing. The second fact concerns the problem of placement of the vehicles onto the track. Clearly there is no way that would produce naturally looking results, without additional work for the 3D artist to maintain the animation paths that would capture the track's shape and orientation. These disadvantages led us to taking a more in-depth look at the qualities of the latter alternative mentioned, hence describing the track in a parametric way.
Parametric track representation
Here we'll present some basic observations and formulate requirements that the parametric representation of a track must meet.
As a first observation, it's clear that what our representation must capture is not only the track's shape, but also its orientation varying along, to be able to properly build the final mesh and to allow simple vehicle placement.
Concerning only the shape, there exist plenty of successful methods applicable for describing it, such as straight lines, Bézier curves, B-splines or arcs. The track in Expiration was built using segments based on variations or little modifications of arcs and straight lines. While being not so flexible as Bézier curves or B-splines or even NURBS, they still have a number of properties favourable to our problem. In the real world the railway's or tram's tracks are not arbitrary, they are mostly straight and their turns resemble arcs. Another rather practical fact is that straight lines and arcs can be evaluated at even distances by simply uniformly substituting for the parameter - as opposed to Bezier curves or B-splines, where evaluation at even distances would require approximation - which is useful for quick vehicle placement and mesh generation.
Track segment
Let us describe the track more formally. As already said, our formalization must parametrize shape and orientation. Since we are going to build the track from segments, some simple means of joining the segments together will be required. With the neccessity of segment joining in mind, to describe the track's location and orientation at each parameter value, we have chosen homogeneous 4×4 matrices consisting of only rotation and translation.
Let's define the track segment's parametric representation as:
|
|
|
Function s captures the track's segment's position and orientation at every parameter t in the interval [0,1], with s(0) representing the beginning of the track segment and s(1) being the end of the track segment. Thus by projecting off the rotational part of the matrix and concerning just the translation we could get a parametric vector function describing the segment's shape.
To avoid more complicated joining of segments, we will assume that for every
segment s it holds that:
|
Obviously, function s could be used as a guide for building up the 3D mesh around the track segment, but we can also utilize it for the vehicle placement, since with function s we know everything about the position and orientation of the track segment at any desired parameter value t.
As an example, this is a turn right by 90� degrees:
|
Entire track
The entire track T consists of a sequence of track segments
s1, s2, ..., sn with their respective geometric lengths
l1, l2, ..., ln. Now we can define the entire track as a sequence
of (segment, length) pairs:
|
|
Now we'll define a knot sequence t0, t1, ..., tn we're about to use in the definition of the entire track evaluation function afterwards. Every knot ti will represent a parameter value for the evaluation function at the joint point of two successive track segments.
|
With length(T) we denote the geometric length of the entire track,
more precisely:
|
Finally, using the knot sequence given we will bring in the function S that
represents the joining of successive track segments, being a function
evaluating the entire track's position and orientation along, with S(0)
describing the beginning of the track, and S(1) being the end of its
last segment.
|
|
Camera views
There were two sorts of camera views utilized within the rollercoaster part
of the Expiration demo: cameras focused on and moving next to one
of the trains, and free, unfocused cameras giving views of a major part
of the entire track.
Each of the two were accomplished by employing spherical linear
interpolation of quaternions [18], more precisely:
|
The unfocused camera views were realized by simply interpolating two fixed camera positions and orientations during a predefined time period, while the other sort of camera views focused on a moving train were slightly more complicated to do, and we are going to describe the method used shortly.
Let's say that the train we would like to focus our camera on is situated somewhere between S(te) and S(tb), for some te < tb. We could simply choose a parameter value u such that te � u � tb, and use the S(u) value as a coordinate space basis useful for placing our camera at S(u)*(Cx, Cy, Cz, 1)T for some position C and targeted at the point written in the last column vector of S(u) matrix, which effectively is track's position at parameter value u. This way the camera would fly next to the train, but with its motion precisely copying the track's shape, which looks much too artificial to be convincing.
We will avoid the artificial look of previosly described approach using
quaternion interpolation. Analogously to the function S we could define
another function:
|
By spherical linear interpolation of quaternions Q(te) and Q(tb), for example qmid = slerp([ 1/2], Q(te), Q(tb)) we would get an orientation that resembles the track's orientation as the train moves. It wouldn't be an exact copy but a harsh approximation depending on how we choose the te and tb parameter values. That would give a more natural look to the camera views generated analogously to the technique described before, after conversion of qmid to matrix M.
We could further place the camera not at a fixed position relatively to the M basis, but let this placement be a function of time, placing the camera at M*C(t), and same with the camera's target.
Bouncing Light Sphere
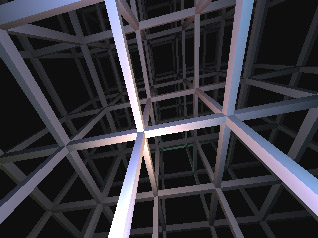
This effect appearing at the end of Expiration was achieved by center projection of the surface texture of a projecting object on its environment utilizing texture mapping [19]. In the method presented, the projecting object is restricted to possess such a shape where it is possible to calculate an intersection with a ray easily. On the other hand, the environment around the projecting object is allowed to be rather complicated. For better results, the environment mesh should by sufficiently tesselated which would help eliminating the effect of non-linearity of center projection in the plane of projection. That's why the two planes in the demo are actually grids. During the rendering, both the object and its environment are represented as a triangle mesh.
For the projecting object we choosed an unit sphere initially located at the origin o=(0, 0, 0) of the 3D space. We define a function t: R3 � R2 to express the texture coordinates across the sphere surface, to be more precise t: P � (u, v) for any point P on the surface.
The effect of projecting the sphere's surface on the environment was realized during an extra rendering pass, where texture of the sphere was mapped onto the environment and texture coordinates for each of environment's vertices were calculated according to position and rotation of the sphere in the following way.
|
Let the sphere's animated position and rotation be expressed by some
transformation T. The whole scene is transformed using T-1,
to relocate the sphere back to its initial position and rotation
at the origin of coordinate space for making the further calculations easier.
So, for each vertex V=(xV, yV, zV, 1)T of the environment
the following vector is found:
|
Thanks to the sphere's position and radius chosen, the intersection point
of a ray R(t) = T-1V+t*[u\vec] with the sphere's surface can be found
rapidly:
|
Finally, this chosen vertex V, texture coordinates are then t(VS) and these same coordinates are used during an extra pass of environment rendering with the sphere's texture.
|
|
|
In theory, the whole demo could be written as a single effect function. This function could be defined as an algebraic expression involving the variables x, y and t - hence the name of the intro.
These ideas are very simple to implement. The texture and mapping functions for different effects can be written directly in the C language. The textures are evaluated and sent to OpenGL at the initialization of the intro. The screen is subdivided into small squares and the mapping function is evaluated at every corner of the grid in a given time moment t. Each square is filled with a textured OpenGL quad primitive. The alpha-blending feature of OpenGL allows for several ''summed'' effects on the screen - the intro uses three to six layers.
|
The only question that remains unanswered is how to define the mapping
and texture functions. As for the mapping, it can be defined as a composition
of several functions such as affine transforms, ''caleidoscopic'' mapping
|
|
This paper introduced the demoscene community phenomenon with its history and present trends with emphasis on bindings to computer graphics and computer programming. The authors further presented some of their own work in this area, describing several methods they used during the creation of the discussed demos.
In the end we would like to give our thanks to all the reviewers for their valuable advices, helping to improve the quality of our paper.