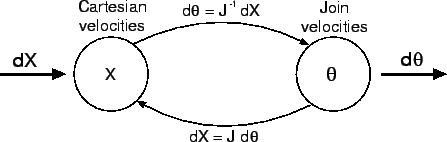
The second phase contains Jacobian matrix inversion and joint
angles changes, using equation (7). The next step lies in the
repetition of step one and in the change of the end effector position. The obtained differential
of the end effector position ![]() enters in phase two. The mentioned phases repeat until the error
(difference between the current and the desired location of the end effector)
comes below a defined value
enters in phase two. The mentioned phases repeat until the error
(difference between the current and the desired location of the end effector)
comes below a defined value ![]() or the maximal number of iteration steps
is reached:
or the maximal number of iteration steps
is reached:
![]() (Figure 3).
(Figure 3).