Applications of Hardware-Accelerated Filtering
Ivan Viola
viola@cg.tuwien.ac.at
VRVis Research Center
Vienna / Austria
http://www.VRVis.at/vis/
Software based filtering techniques often do not satisfy performance
requirements of real-time applications. Therefore various hardware-based
solutions have been introduced to the computer graphics community. In this
paper we review methods that exploit the texture hardware features of consumer
graphics cards for filtering purposes. We compare the texture-based filtering
techniques to relevant existing solutions in qualitative and performance
issues.
KEYWORDS: texture reconstruction, texture filtering, high-resolution
filters, convolution filters, image processing, pattern recognition,
graphics hardware.
One of the fundamental tasks of computer graphics, image and signal processing
is how to process the sampled data to get the desired result. The one-, two-
and three-dimensional datasets are represented by discrete samples must fulfill
certain conditions of sampling theory. Sampling theory is dealing with two
fundamental tasks - sampling and reconstruction. Sampling describes how dense
the original function should be sampled to be exactly described by its discrete
representation. Reconstruction theory describes how to get the continuous
function from its discrete samples [12]. The reconstruction process is
defined as a convolution of the discrete sampled function with a reconstruction
kernel. This kernel could be continuous, but in practice we also use
discrete filters of high sampling resolution. The convolution sum between the
sampled function and filter kernel is given by:
where g(x) is the original function, f[i] its sampled
representation and h(x) the reconstruction filter of width m.
If the original function was
band-limited before it was sampled we could perfectly reconstruct it using the
sinc function as the filter kernel. The problem of the sinc filter that
makes it unusable in practice is its infinite support.
Therefore several approaches have been introduced to perform high-quality
reconstruction, based on approximation of the sinc on a limited interval.
Keys [8] derived a family of cardinal splines suitable for
reconstruction purposes, classifying the Catmull-Rom spline as numerically
most accurate. Mitchell and Netravali [9] derived another category of
cubic splines called BC-splines that are very popular as reconstructions
kernel as well. They have classified various types of these splines according
to the B and C
parameters and determined boundaries of their admissible
values. Theußl et al. [14] classified various windowing functions
that limit the sinc extent to a particular interval, showing the Kaiser,
Blackman and Gauss windows with best properties in the frequency domain.
Möller et al. [10] presents a general framework for cardinal and
BC-splines classification in spatial domain.
Although current graphics chips are equipped with a lot of features, the
problem of the insufficient precision of the current hardware remains.
Therefore, there are just few approaches to use the hardware for filtering.
The methods are mostly dealing with image processing filtering methods such as
the algorithm introduced by James [7]. This approach exploits the
texture hardware for image processing convolution. The only method using
hardware for high resolution filtering for reconstruction purposes is proposed
by Hadwiger et al. [2,3,4]. This general framework for
hardware-based filtering also exploits the texturing hardware the filtering
purposes. The image processing convolution by James can be considered as
a subset of this general framework.
Beside these methods another approach was proposed by Hopf and Ertl
[5] using OpenGL Imaging Subset [11] and texture hardware to
extend the natively supported 2D convolution to 3D. A year later they
introduced non-linear hardware-accelerated image processing with erosion and
dilation operators [6].
The reason why we do not use the OpenGL Imaging Subset is insufficient
performance on consumer hardware, as well as the limitation to image processing
tasks.
Graphics chips are designed to perform the primitive mathematical per-fragment
operations for all fragments simultaneously. This fact is exploited in all
texture-based filtering techniques [2,3,4,7].
These algorithms are based on the distribution principle used in
splatting rendering solutions as well [15]. Instead of gathering
all input sample contributions within the kernel width neighborhood of single
input sample, hardware solutions use different evaluation order. This
distributes all single output sample contributions to all relevant output
samples. We show the hardware based distribution filtering principle on a
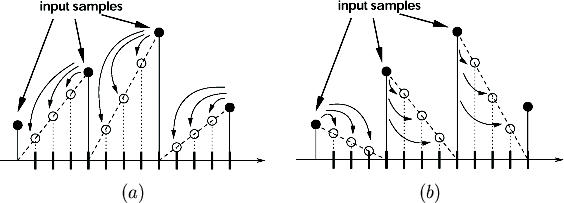
tent filter example.
The input sample function is stored in one texture the filter kernel in another
one. The kernel texture is scaled to cover exactly the contributing samples.
The number of contributing samples is called kernel width. To be able to
perform the same operation for all samples in one time, we have to divide the
kernel into several parts to cover always only one input sample width. Lets
call such parts filter tiles. The tent filter is of width two - there
are two samples contributing on the output resampling points between them.
Instead of taking the whole filter kernel, we take first the left tile of it.
As already mentioned this is scaled exactly to the width between two input
samples. To compute the ``left'' contribution of each input sample we shift the
input texture to the left by one half of the sample distance. After this each
input sample covers exactly the left tile of the filter kernel. Now we have the
input function in one texture and the kernel tile of the input texel width in
another one. The kernel texture is repeated to cover the whole input function.
We set the numerical operation between these two textures to multiplication
and render it to the framebuffer. This subresult is the left tile contribution
of each input sample to the output resampling points. This is done in a single
rendering pass. We repeat this process with the right tile, set the framebuffer
blending function to addition and render the other contribution to the
framebuffer again. Framebuffer stores the result of the filtering process that
took two rendering passes. The distribution of the left and right tile
contribution is illustrated in figure 1.
Figure 1:
Distribution of left (a) and right (b) contributions on the
resampling points.
 |
The general filtering algorithm uses two textures simultaneously. In the case
when the hardware is able to use more than two textures in a single rendering
pass, we can perform more filtering passes in one rendering pass. This
increases the processing perfomance in some cases almost linearly and leads
also to qualitatively better results due to exploiting the hardware internal
precision for the addition as well. The precision of the framebuffer is 8
bits, while the internal precision of the best consumer cards of today is up
to 12 bits. All the algorithms described below can be to expanded to take
advantage of more available texture units or they can be combined together to
achieve optimal results. Each algorithm has its own notation - the first three
letters identify the filtering algorithm and the rest describe the number of
used texture units within the rendering pass.
- Standard algorithm is in fact identical with filtering
approach shown on the tent filter example and is denoted as std-2x. It
uses general filter kernel without exploiting any filter characteristics.
- Symmetric filter kernels could be used for reduction of the
hardware memory consumption. Instead of storing whole kernel, we just store a
subset and generate the desired kernel tile by mirroring the existing parts. The
algorithm does not have any performance influence, therefore we do not use any
special notation, it is used for memory saving purposes, which is especially
significant in the 3D case.
- Separable filter kernel allows us to store the filter kernel in
lower dimensional parts, that are multiplied on-the-fly producing the
desired filter kernel. The texture traffic is much lower, which has significant
impact on the performance, but it involves more texture units than the standard
case. We denote this algorithm by sep-3x.
- Pre-interleaved monochrome input algorithm is exploiting the
per channel dot product pixel shader feature. This method assumes monochrome
interleaved textures as input. Each pixel stores its own value in the R
channel, the other three channels are reserved for the next three pixel values
toward the right from the current one. The filter kernel stores the sampled
filter in the same style. This allows to compute four contributions to the
current output sample accessing only one input sample. The notation for this
algorithm is dot-2x, or combined with separable kernels spd-3x.
The filtering process discussed till now was a generalisation for all
convolution based filtering methods. However in the special case of image
processing filtering, where the input and output sample grid is exactly the
same, we can use the James algorithm. Instead of using texture tiles for
representing the filter kernel, we use color values. Image processing filters
are very rough approximations of the continuous ones. They represent each part
or tile only by one value, therefore we can substitute the filter
texture with color values. The reason for using color values instead of
textures is saving the texture traffic and number of texture units, which could
be used to fold more filtering passes into a single rendering pass.
The ``dot'' algorithm can be used for image processing task as well, but the
algorithms exploiting filter kernel properties are irrelevant, because the
whole image procesing filter is stored in a lookup table in just a couple of
float values.
This section reviews the possible application areas of the hardware based
filtering approach. Firstly we are going to mention the high resolution filters
applicability and then some image processing areas. The biggest importance
of the hardware filtering principle is its generality - it is possbile to use
any type of filter to achieve high-quality results in real-time.
The first application area of high resolution filtering is surface texturing.
We use higher order filters of width four, namely cubic B-spline, Catmull-Rom
spline and Kaiser windowed sinc of width four. Using such filters is especially
effective, when the input texture is sampled at low frequency. Reconstructing
it using hardware native linear reconstrucion results in visible artifacts.
Software based higher order reconstruction would not have sufficient filtering
performance. The typical low texture resolution representatives are lighting
effects, such as lightmaps [1]. We show the results of various filter
types in figure 2.
The performance of the
state-of-the-art graphics cards using various filtering algorithms
is shown in the tables 1 and 2. The
tested texture is of 64 x 64 resolution.
Table 1:
Framerates of NVidia GeForce3 surface texturing, using different
filtering algorithms. In brackets is the number of rendering passes.
| # pixels |
std-2x (16) |
std-4x (8) |
dot-2x (4) |
dot-4x (2) |
sep-3x (16) |
spd-3x (4) |
| 60k |
55 |
105 |
190 |
275 |
55 |
190 |
| 180k |
55 |
57 |
125 |
108 |
55 |
188 |
| 260k |
50 |
36 |
80 |
60 |
46 |
150 |
| 900k |
25 |
15 |
28 |
19 |
22 |
70 |
| 1200k |
20 |
18 |
28 |
13 |
15 |
55 |
|
Table 2:
Framerates of ATI Radeon 8500 surface texturing. In brackets is the
number of rendering passes.
| # pixels |
std-2x |
std-4x |
dot-2x |
dot-4x |
sep-3x |
sep-6x (8) |
spd-3x |
spd-6x (2) |
| 60k |
24 |
46 |
90 |
167 |
24 |
46 |
90 |
167 |
| 180k |
24 |
34 |
71 |
78 |
24 |
46 |
71 |
83 |
| 260k |
17 |
19 |
45 |
45 |
24 |
46 |
55 |
62 |
| 900k |
9 |
9 |
20 |
19 |
23 |
35 |
26 |
27 |
| 1200k |
8 |
9 |
16 |
15 |
16 |
24 |
55 |
32 |
|
Figure 2:
Surface textured teapot using tent, cubic B-spline, Catmull-Rom
spline and Kaiser windowed sinc filters (from left to right).
 |
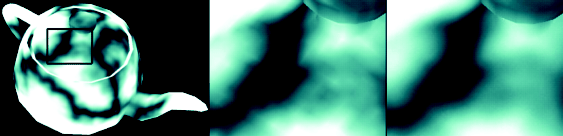
In this case we are dealing with the same higher order filters as in the 2D
case, however they are three-dimensional. This texturing approach is used in
cases, when the two-dimensional description does not provide acceptable
results. Some examples are marble and wood materials. To be able to store more
3D textures in the hardware memory, we have to store them in low resolution. To
obtain high-quality results from such datasets, higher order filtering must be
performed. Another application area of growing importance is volume rendering.
To avoid the linear reconstruction artifacts, the kernels of higher order are
involved again. The tables 3 and 4
show the performance of various algorithms on a 128 x 128 x 128
dataset.
This dataset is shown in figure 3 comparing tri-linear to
tri-cubic interpolation.
Table 3:
Framerates of NVidia GeForce3 solid texturing.
| # pixels |
std-2x (64) |
std-4x (32) |
dot-2x (16) |
dot-4x (8) |
sep-4x (64) |
spd-4x (16) |
| 60k |
19 |
21 |
64 |
66 |
21 |
76 |
| 180k |
6.5 |
6.8 |
20 |
20 |
14 |
50 |
| 260k |
4.2 |
4.5 |
11 |
11 |
8.7 |
34 |
|
Table 4:
Framerates of ATI Radeon 8500 solid texturing.
| # pixels |
std-2x (64) |
std-4x (32) |
dot-2x (16) |
dot-4x (8) |
sep-4x (64) |
spd-4x (16) |
| 60k |
23 |
26 |
71 |
71 |
59 |
90 |
| 180k |
4.2 |
4.5 |
15 |
16 |
30 |
30 |
| 260k |
2.8 |
2.3 |
8 |
9 |
18 |
40 |
|
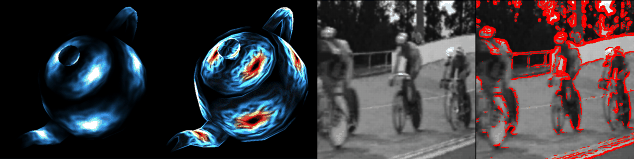
Figure 3:
Solid textured teapot using tent and cubic B-spline filters (from left
to right).
 |
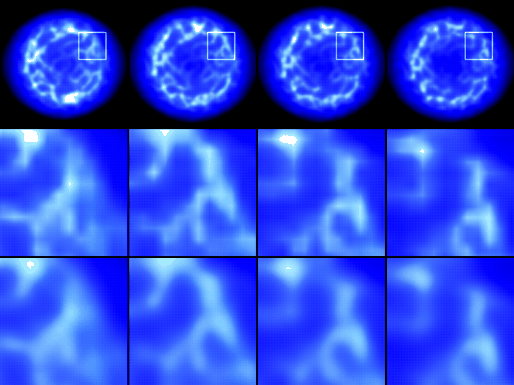
High-quality reconstruction is even more important when using animated textures
than in the static case. Linear interpolation produces much more visible
artifacts, because the underlying interpolative grid, already stronly visible
in the static case, appears as static layer beneath the moving texture. Higher
order filtering like cubic interpolation completely removes such artifacts.
This effect is most visible in animations with rotating objects. We divide the
animation into the following three types according to their generation stage.
- Pre rendered animation means the frames are computed in a
preprocessing step. To be able to perform real-time animation, we have to
store all frames as textures, which has extreme requirements on the hardware
memory capabilities. Therefore we store them in lower resolution and
reconstruct them using higher order filters.
- Procedural CPU animation produce frames generated
on-the-fly. Each frame, which is generated is transferred to the
graphics hardware and displayed as a mapped texture. The transfer and
generation stage are the most time-consuming operations. Generating and
transfering lower resolution textures significantly improves the performance.
- Procedural GPU animation is similar technique as procedural CPU
but has one advantage among the other ones. The frame produced in graphics
hardware does not need to be transferred to graphics memory, because it is
already stored there. However such animations are much more limited in the
generation stage than CPU generated animations. The reason of low resolution
sampling is the same as in the previous case.
We show the difference between tri-linear and tri-cubic filtering on a
pre-rendered animation frame of variable texture resolution in figure
4.
Figure 4:
Prerendered animation frames from the space combat game Parsec
[13] (top column) filtered with tent (middle) and cubic B-spline filter
(bottom).
 |
The previous applications used various function reconstruction filters. The
generality of the filtering algorithm allows us to implement derivative
reconstruction on hardware basis as well. This will make possible to
compute, e.g., gradients on-the-fly, which are mostly computed in a
preprocessing step in real-time applications. Although the simplest software
solution - central differences - computes gradients in a short time, it
produces visible staircase artifacts. This effect will be completely removed by
using higher order high resolution kernels for the derivative reconstruction.
In our high resolution filtering implementation we have used filters of fixed
width of four. The image processing filtering is extended to filters of
arbitrary width. The typical filters of variable width are smoothing operators
used for noise reduction in the way of cutting off the high frequencies of the
image. We use two types of smoothing filters - averaging and Gaussian filter.
The second one is based on the Gaussian lobe function that describes the noise
distribution probability. The table 5 shows performance of
the smoothing process on an image of 512 x 512 resolution. Filtering
with kernels of width seven and higher results in strong visible summation
artifacts. Therefore we are using quality improvement algorithms that provide
acceptable results, but the framerates are about half of that from the
benchmark table.
Table 5:
Framerates of NVidia GeForce3 smoothing operation, using different
filter kernel width.
| kernel width |
img. subset |
std-1x |
std-2x |
std-4x |
dot-1x |
dot-2x |
dot-4x |
| 3 |
3.26 |
120.00 |
180.00 |
185.00 |
275.00 |
307.00 |
314.00 |
| 5 |
2.86 |
50.00 |
74.00 |
75.50 |
118.00 |
169.00 |
155.00 |
| 7 |
2.48 |
28.00 |
40.50 |
41.70 |
90.00 |
131.15 |
121.00 |
| 9 |
1.95 |
17.00 |
25.50 |
26.40 |
50.00 |
73.66 |
76.45 |
| 11 |
- |
12.00 |
17.55 |
17.99 |
41.48 |
61.30 |
55.96 |
| 13 |
- |
8.20 |
12.61 |
13.55 |
26.86 |
41.75 |
43.15 |
| 15 |
- |
6.24 |
10.03 |
10.05 |
22.39 |
36.68 |
35.40 |
| 17 |
- |
5.00 |
7.66 |
7.96 |
16.76 |
28.17 |
25.27 |
| 19 |
- |
3.95 |
6.30 |
6.61 |
15.02 |
23.42 |
24.12 |
|
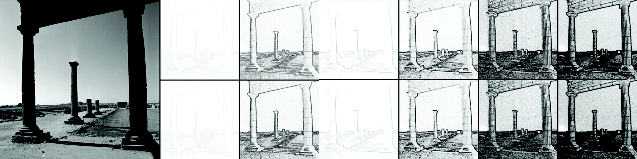
The second type of image processing filters are edge detectors. These are
applicable in almost all pattern recognition and computer vision areas, that
involve almost always real-time performance. This is hard to achieve in
software solutions, without exploiting any hardware. Our implementation uses
two types of edge detector - Sobel and Laplacian operator. The Sobel filter
approximates the first order derivatives and the Laplacian second order
derivatives. The Laplacian filter uses only one convolution mask for the
filtering process and is faster than Sobel. Its disadvantage is that it
describes only the magnitude of the edge response. The Sobel filter consists
of two or more kernels - for each dimension at least one. These filters are of
more variations, the benchmark table 6 shows filtering
performance on an image of 512 x 512 resolution for all of them. The
Laplacian filter has two variations with low weight values and high. This has
the impact on the resulting edge visibility. Similar to Laplacian, the Sobel
filter is also presented with low and high weight values. The next Sobel
clones use more than two filter kernels to improve the edge detection process.
Also these are of acceptable performance. The results of the edge detectors
using imaging subset and texture based filtering is shown in figure
5.
Table 6:
Framerates of NVidia GeForce3 edge detection, using different
edge detecting operators.
| edge detector |
# kernels |
img. subset |
std-1x |
std-2x |
std-4x |
|
|
| Laplace low |
1 |
3.18 |
125.00 |
165.00 |
190.00 |
|
|
| Laplace high |
1 |
3.18 |
77.00 |
118.00 |
120.00 |
|
|
| Sobel low |
2 |
1.38 |
65.00 |
106.00 |
133.00 |
|
|
| Sobel high |
2 |
1.38 |
66.50 |
97.00 |
94.50 |
|
|
| Sobel high |
2 x 2 |
0.70 |
35.30 |
50.00 |
51.15 |
|
|
| Sobel high |
4 x 2 |
0.35 |
16.91 |
23.30 |
24.10 |
|
|
|
Figure 5:
Edge detection using Laplacian low and high, Sobel low, high,
high 2 x 2
and high 4 x 2
edge detector variations (from left to
right).
Upper image is filtered using OpenGL Imaging Subset and below is corresponding
texture based filtering result. The resulting colors are inverted.
 |
Beside these fundamental convolution based operation, there are other arbitrary
filters used in the desktop publishing area. We show that exploiting graphics
hardware and combining various features, we are able to implement
non-photorealistic rendering techniques at real-time performance.
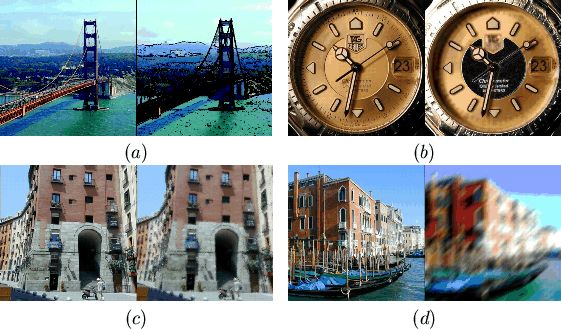
The artistic techniques discussed below are shown in figure 6.
- Painting with enhanced edges is a technique, that combines
the result of edge detectors and smoothing in the pixel shader to create
customizable painting-like results. If we turn off the smoothing we get the
original image with enhanced edges, which can be used for pattern recognition
purposes as well.
- Filter combination on a pre-masked image assumes a segmented
image on the input. We use the alpha channel as segmentation masks. We filter
the image more times using various kernels and combine it together using the
alpha test of the source image.
- Pointilism painting uses a randomly generated noise mask for the
stencil test. The generation of the noise mask is the only part of the process
done on CPU. What we do is, we combine the original input image with a smoothed
one to create a pointilism-like effect.
- Anisotropic filtering uses non-symmetric kernels to simulate
one-directional brush strokes.
Figure 6:
Various artistic rendering techniques - painting with enhanced edges
(a), filter combination on a pre-masked image (b), pointilism painting (c) and
anisotropic filtering (d).
 |
All the image processing filters mentioned above are possible to integrate in
various applications. The idea of post filtering is to integrate such filtering
directly into particular process that generates images, but instead of
transferring them immediately to display, we process them with our image
processing filters. This could be considered as ``screen space'' processing.
The typical application is for example integrating non-photorealistic rendering
technique in a standard renderer, or to filter the output from a CCD camera
for video surveillance purposes. These examples are shown in figure
7.
Figure 7:
Built-in real-time post filtering techniques.
 |
We have presented a framework for texture based filtering with arbitrary
filters. The framework shows possibilities to use higher order high resolution
filter for reconstruction purposes, as well as simple image processing
operators applicable in pattern recognition or computer vision. Exploiting
graphics hardware makes possible to perform filtering tasks in real-time.
The software implementations of such tasks are still far from real-time.
We present an alternative to natively supported linear interepolation. To
remove artifacts of linear filtering, we use higher order filtering techniques
of real-time performance. The image processing operations can be performed at
about 100 frames per second, which can strongly reduce the time consumption in,
e.g., automatic person identification.
However, in some cases we still have problems with hardware shortcomings like
framebuffer range and precision. The precision of 8 bits forces us to include
quality improvement algorithms, that unnecessarily consume processing time.
This work has been done in the scope of the basic research on visualisation
(http://www.VRVis.at/vis/) at the VRVis Research Center in Vienna,
Austria (http://www.VRVis.at/), which is funded by an Austrian
research program called Kplus.
Special thanks to Markus Hadwiger and Helwig Hauser for patient supervision.
- 1
-
M. Abrash.
Quake's lighting model.
In Graphics Programming Black Book. Coriolis Group Books, 2001.
- 2
-
M. Hadwiger, T. Theußl, H. Hauser, and E. Gröller.
Hardware-accelerated high-quality filtering of solid textures,
technical sketch.
In SIGGRAPH 2001 Conference Abstracts and
Applications, page 194, 2001.
- 3
-
M. Hadwiger, T. Theußl, H. Hauser, and E. Gröller.
Hardware-accelerated high-quality filtering on PC hardware.
In Proceedings of Vision, Modeling, and Visualization 2001,
pages 105-112, 2001.
- 4
-
M. Hadwiger, I. Viola, and H. Hauser.
Fast convolution with high-resolution filters.
Technical Report TR-VRVis-2002-001, VRVis Research Center,
Vienna, Austria, 2002.
- 5
-
M. Hopf and T. Ertl.
Accelerating 3D convolution using graphics hardware.
In IEEE Visualization '99, pages 471-474, San Francisco, 1999.
IEEE.
- 6
-
M. Hopf and T. Ertl.
Accelerating morphological analysis with graphics hardware.
In Proceedings of Vision, Modeling, and Visualization 2000,
pages 337-346, 2000.
- 7
-
G. James.
Operations for hardware-accelerated procedural texture animation.
In Game Programming Gems 2, pages 497-509. Charles River
Media, 2001.
- 8
-
R. G. Keys.
Cubic convolution interpolation for digital image processing.
IEEE Trans. Acoustics, Speech, and Signal Processing,
ASSP-29(6):1153-1160, 1981.
- 9
-
D. P. Mitchell and A. N. Netravali.
Reconstruction filters in computer graphics.
In Proceedings of SIGGRAPH '88, pages 221-228, 1988.
- 10
-
T. Möller, R. Machiraju, K. Mueller, and R. Yagel.
Evaluation and Design of Filters Using a Taylor Series Expansion.
IEEE Transactions on Visualization and Computer Graphics, 3(2),
1997.
- 11
-
OpenGL official site. http://www.opengl.org/.
- 12
-
A. V. Oppenheim and R. W. Schafer.
Digital Signal Processing.
Prentice Hall, Englewood Cliffs, 1975.
- 13
-
Parsec - there is no safe distance. http://www.parsec.org/.
- 14
-
T. Theußl, H. Hauser, and M.E. Gröller.
Mastering windows: Improving reconstruction.
In Proceedings of Visualization '00, 2000.
- 15
-
L. Westover.
Footprint evaluation for volume rendering.
Computer Graphics, 24(4):367-376, 1990.
This document was generated using the
LaTeX2HTML translator Version 99.2beta8 (1.43)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -t 'Applications of Hardware-Accelerated Filtering' -antialias_text -antialias -white paper.tex
The translation was initiated by Ivan Viola on 2002-03-21
Ivan Viola
2002-03-21
![\begin{displaymath}
g(x)=(f\ast{}h)(x) = \!\!\!\!\!\!\sum_{i=\lfloor x \rfloor -...
...}^{\lfloor x \rfloor + \lceil m \rceil}\!\!\!\!\!\!f[i]h(x-i),
\end{displaymath}](img3.png)