


Next: Summary of problems and
Up: Iterative methods
Previous: Genetic programming
Jacobian transpose method removes the problematic Jacobian inversion
mentioned above. The annoying inversion is replaced by a simple
transposition [Wel93]. The idea is based on the principle
of virtual works and generalized forces [Pau81].
The external force
![$F = [f_x. f_y, f_z, m_x, m_y, m_z]^T$](img40.png) (consisting of pull
(consisting of pull  and twist
and twist  ) is applied to the end
effector of the articulated structure and results internal forces
and torques in the joints. The relation between the force
) is applied to the end
effector of the articulated structure and results internal forces
and torques in the joints. The relation between the force  and
the generalized forces
and
the generalized forces  is expressed as
is expressed as
The generalized forces could be expressed using either the
joint variable accelerations  or joint velocities
or joint velocities
 [NN90]. The joint accelerations could be used
for an accurate dynamic simulation of the manipulator motion. Because
the method is not interested in the dynamic behavior,
only the joint velocities are used
for the necessity of this method. Thus equation (10) is
supplied by another form:
[NN90]. The joint accelerations could be used
for an accurate dynamic simulation of the manipulator motion. Because
the method is not interested in the dynamic behavior,
only the joint velocities are used
for the necessity of this method. Thus equation (10) is
supplied by another form:
The force is proportional to the velocity in equation (11). That
means the object moves as long as the force takes effect. The inertia
and torques are not applied.
The scheme of the iterative model is demonstrated by the Figure 4.
Figure 4:
Iterative model adopted for the Jacobian transposition method.
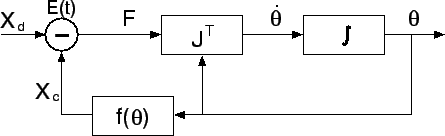 |
The force corresponds to error function  expressed by equation
expressed by equation
 .
.  is the error along the time-varying
trajectory,
is the error along the time-varying
trajectory,  is current position and
is current position and  is desired trajectory
of the end effector.
is desired trajectory
of the end effector.
Next: Summary of problems and
Up: Iterative methods
Previous: Genetic programming
Lukas Barinka
2002-03-21