In the case when the degree of freedom is different than 6 in 3D space
(3 for location, 3 for rotation) -- generally, if the dimension of ![]() is not equal to the dimension of
is not equal to the dimension of ![]() , the Jacobian matrix is rectangular
and consequently not invertible. In that case, pseudo-inversion
could be used for the rectangular matrix inversion by singular value
decomposition [GK65]. The disadvantage of the
pseudo-inversion is that some numerical errors appears, because that method
is approximate and local. If the change of
, the Jacobian matrix is rectangular
and consequently not invertible. In that case, pseudo-inversion
could be used for the rectangular matrix inversion by singular value
decomposition [GK65]. The disadvantage of the
pseudo-inversion is that some numerical errors appears, because that method
is approximate and local. If the change of ![]() is too large, according to
the facts mentioned above, errors often occur. These errors are called
``tracking errors'' [WW92]. The solution of that problem is to
divide the path into smaller steps.
is too large, according to
the facts mentioned above, errors often occur. These errors are called
``tracking errors'' [WW92]. The solution of that problem is to
divide the path into smaller steps.
When the rank of the Jacobian matrix differs from the DOFs (some rows are
linearly dependent), the number of solutions is infinite and the matrix
is not invertible. Singularities usually occur in the full extended
state (Figure 5a -- the change of ![]() and/or
and/or ![]() causes the same differential movements of the end effector). There is not
just a single solution in that situation, a choice has to be
done, or the prevention of such states (e.g. used in robotics -
singular states are not allowed).
causes the same differential movements of the end effector). There is not
just a single solution in that situation, a choice has to be
done, or the prevention of such states (e.g. used in robotics -
singular states are not allowed).
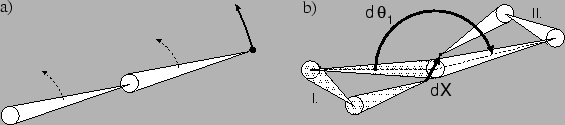
If the structure is near the singular state or at the transition
between singular and nonsingular state, high velocities and
oscillations occur.
Example of such a problematic state is shown in Figure 5b.
In the example
![]() ,
,
![]() . It means that the distance in Cartesian
space is small, but the distance in joint space is large (compared to
the Cartesian space). That state is called ``ill conditioned'' [WW92].
. It means that the distance in Cartesian
space is small, but the distance in joint space is large (compared to
the Cartesian space). That state is called ``ill conditioned'' [WW92].
The good feature of this method is its expected behavior. The articulated structure behaves like rubber. This method is also quite fast for smaller articulated structures therefore it could be used in the real time animations.