


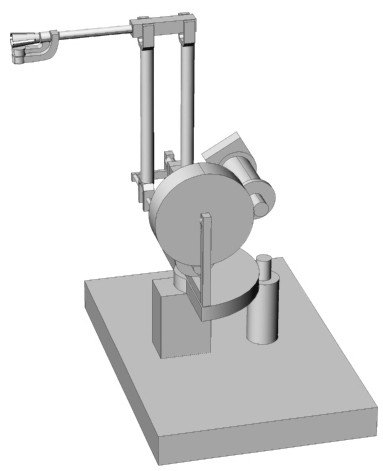
In the Human-Computer Interactions Laboratory the PHANToM device was available to realize haptic interface of our program. PHANToM is a product of the SensAble Technologies, Inc.. It provides a haptic experience that reproduces human touch with real world and allow users to feel the physical properties of virtual 3D objects. We experimented with the model 1.0 (Fig. 1). Dimensions of its workspace are aproximately 13 x 18 x 25 cm (roughly extent of a human forearm). The maximum exertable force is 8.5 N.
GHOST (General Haptic Open Software Toolkit) SDK is an object-oriented toolkit, written in C++, containing classes and methods for support of PHANToM haptic interface. It represents the haptic environment as a hierarchical collection of geometric objects and spatial effects (buzzing, inertia, viscosity etc.). GHOST strongly supports triangular meshes therefore we chose this representation of 3D objects.