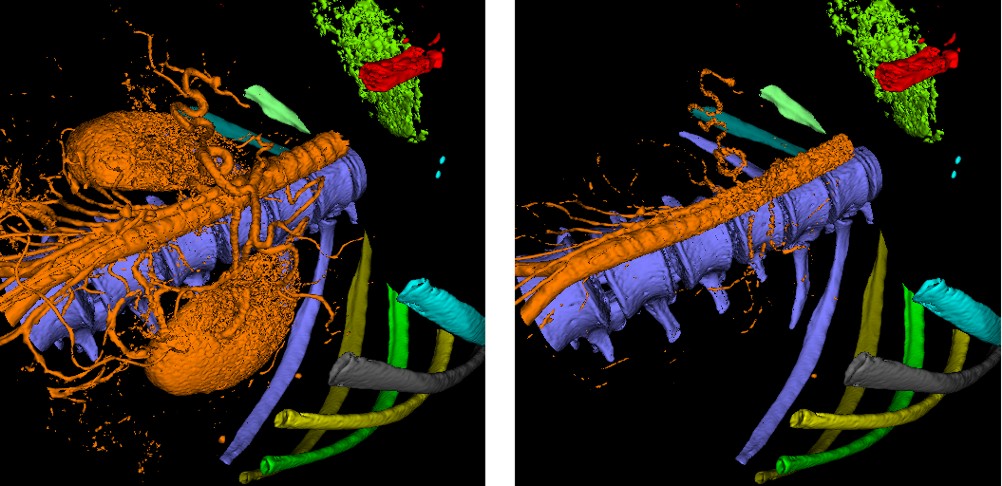
Objects of the first type are represented in the volume by voxel data values which are on a higher level than the surroundings of the objects. Examples are bones and blood vessels (if flooded by a contrast agent) in a CT image. Those objects have the advantageous property that their surfaces approximately coincide with properly chosen iso-surfaces. They can be segmented by a simple thresholding-based segmentation technique: An initial threshold is chosen. Neighboring voxels whose data values are above this threshold are merged to objects. The number of objects can then arbitrarily be set to n by deleting all but the n biggest objects. Then the threshold is iteratively decreased and each object is enlarged to include neighboring voxels above the new threshold. Since each voxel may only belong to one object, the objects will, when the threshold is small enough, collide and cease growing. Now, each object can be rendered independently with an individual threshold adapted to the viewer's needs. Figure 2 shows some objects representing bones as well as an object that includes the aorta and, if the threshold is decreased, also other major blood vessels and the kidneys. The appearance of this object can be interactively altered without changing the appearance of any other object.
The majority of objects (e.g., almost all inner organs) belong to the other group. They require more sophisticated treatment, because they have two disadvantages:
The first disadvantage is that iso-surfaces cannot be used to represent object boundaries, since the representations of those objects in the data volume can be bounded by regions of lower as well as regions of higher data levels. The segmentation process must take into account gradient information. The watershed algorithm [2,4] is a well known technique that is suitable for this task. This technique, when used to segment a two-dimensional image, takes the gradient image as an input height field which is virtually flooded with water. This process produces catchment basins which correspond to objects. For the segmentation of a volume, an analogous three-dimensional procedure is applied.
The second disadvantage is that sometimes parts of object boundaries are not indicated by significant gradients, because tissues neighboring the object of interest can also be represented by data values on the same or a very similar data level as the object. Here, the segmentation process must be aided by manually separating objects. An algorithm called watershed-from-markers [5] can be applied. It is a variation of the watershed algorithm, which takes a manually placed set of markers into account.
After such an object is segmented, the problem of visualization remains. Since the object boundary differs strongly from every possible iso-surface, an artificial iso-surface must be generated. One possible way to do this is to lift the complete object representation to a higher level, above the object surroundings, by adding an offset to all voxel data values belonging to the object representation before the rendering process. Now, the object can be rendered using iso-surfacing. The appearance of the artificial iso-surface is, however, very much dependent on the offset used. Low offset values, which lift the object just slightly above its surroundings, leave the iso-surface very threshold-dependent. This may be undesirable, as for example in the trans-bronchial biopsy case, where the lung tumor should appear in its real size for a wide range of different thresholds. Large offset values, on the other hand, cause high spatial frequencies in the volume and therefore terracing: sloped surfaces degenerate to sequences of close to flat planes. The lung tumor, in this case, would appear as what its representation, obtained from the modality, is: a finite collection of discrete samples, rather than a natural formation.