


Next: Background
Up: ik
Previous: Abstract
Kinematics in computer animation is usually divided into two basic parts
- forward kinematics and inverse kinematics.
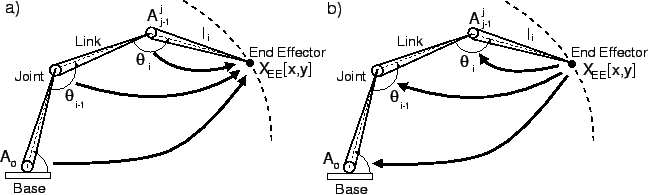
Forward kinematics is based on the manipulation with the structure, that
is done by changes of the joint angles inside the controlled structure
(Figure 1a). Inverse kinematics is based on the direct manipulation
with the end of the structure and the joint angles are derived from changes of
the end of the structure
(Figure 1b).
Figure 1:
Process of manipulation of the structure through a) forward b) inverse kinematics.
 |
Since inverse kinematics makes possible to manipulate
the articulated structure by the end effector, it could be used
in animation techniques for easy motion control.
The problems relating to the inverse kinematics are known for a long
time and are in more detail described in the literature,
e.g. [WW92], [Wel93], [Chi96].
Lukas Barinka
2002-03-21